
La technologie segway
Inventé par Dean Kamen en 1999, le gyropode Segway est le premier moyen de transport fondé sur le principe de l’équilibre dynamique.

Comment ça fonctionne ?
Pour avancer ou reculer, il suffit de se pencher en avant ou en arrière. Le gyropode Segway® s’occupe de maintenir l’équilibre du pilote !
Le fonctionnement du gyropode Segway® est en effet calqué sur le corps humain:
Lorsque vous vous penchez en avant, votre oreille interne indique à votre cerveau que vous êtes en train de perdre l’équilibre. Vos muscles reçoivent alors l’ordre de mettre un pied en avant pour rétablir les choses. Vous ne tombez pas, vous marchez, en mettant un pied devant l’autre ! Le gyropode Segway® fonctionne de la même manière. Ses pieds sont ses roues, son cerveau, un ensemble de micro processeurs, et son oreille interne est constituée de gyroscopes et de capteurs très sophistiqués. Le gyropode Segway® détecte votre inclinaison et donne aux roues le mouvement nécessaire pour que vous restiez en équilibre tout en vous déplaçant.
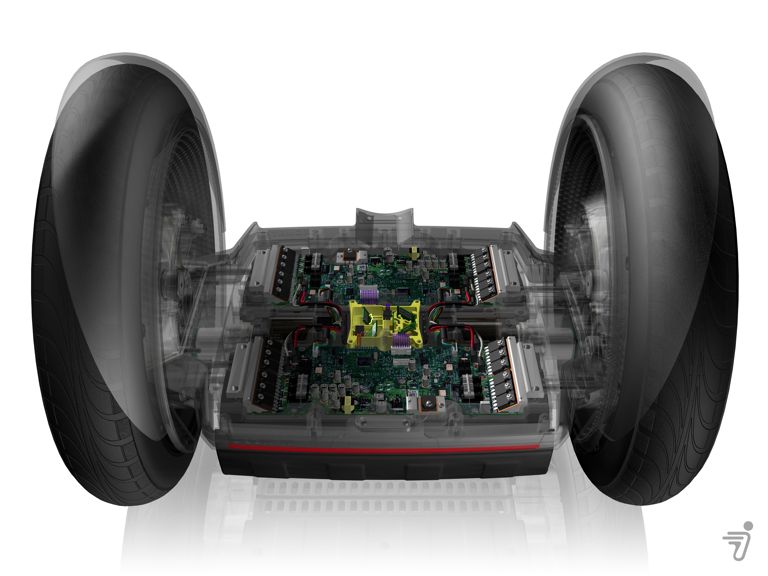
Le gyropode Segway® est avant tout un ensemble de capteurs, de calculateurs et de moteurs.
Le cerveau et les muscles
Les gyroscopes sont au cœur du système. Un gyroscope est une roue qui tourne dans un support fixe. Or, un objet en rotation s’oppose à tout mouvement de son axe. Si vous poussez sur l’axe d’une toupie, par exemple, elle opposera une force contraire qui annulera le mouvement.
En s’opposant à toute force extérieure, la roue d’un gyroscope maintient sa position dans l’espace (relativement au sol). Mais son support peut bouger librement. En mesurant la position de la roue par rapport au support, un capteur peut donner à la fois l’inclinaison d’un objet et la vitesse à laquelle il s’incline.
Le gyropode Segway® n’utilise pas des gyroscopes conventionnels mais des capteurs au silicium qui mesurent l’effet Coriolis.
Les gyroscopes du gyropode Segway® sont composés d’une minuscule plaque de silicium montée sur un support. Les particules de silicium sont agitées par un courant électrostatique qui traverse la plaque. Celle-ci émet alors une vibration. Lorsque la plaque tourne sur son axe (c’est-à-dire lorsque le gyropode Segway® s’incline), la vibration change proportionnellement au degré de rotation. Le gyroscope mesure ce changement de vibration et transmet l’information aux calculateurs. Ceux-ci peuvent alors déterminer les mouvements du gyropode Segway® sur son axe.
Le gyropode Segway® contient 5 gyroscopes bien que 3 lui suffisent pour détecter tous les mouvements. Les 2 gyroscopes supplémentaires sont là pour assurer la sécurité de l’utilisateur en cas de panne
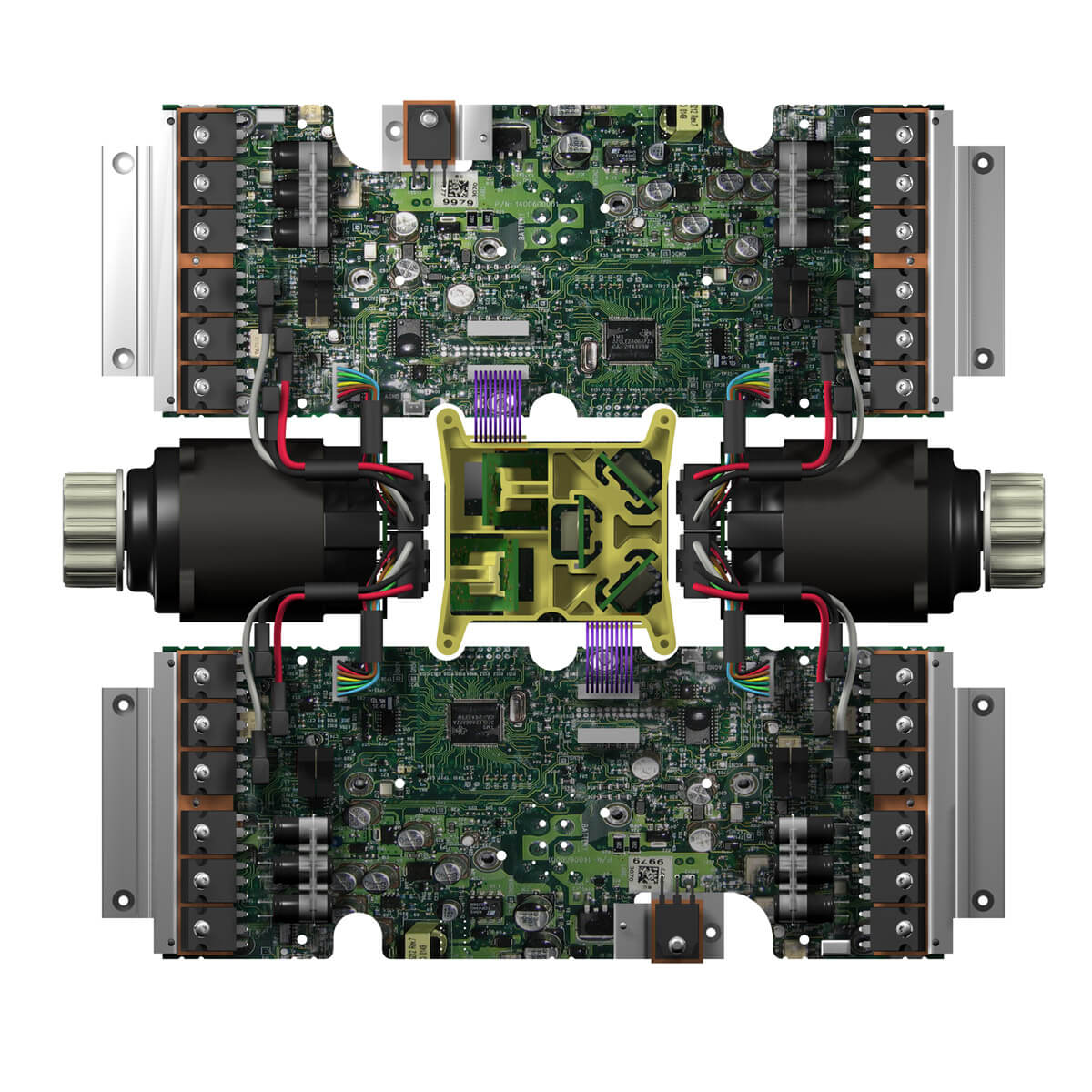
Des calculateurs performants
Les informations sont transmises à deux ordinateurs comprenant des calculateurs dédiés. Cette puissance est nécessaire pour accomplir très rapidement tous les calculs extrêmement précis nécessaires au maintien de l’équilibre. Si l’un des ordinateurs tombe en panne, l’autre prend immédiatement la relève pour arrêter le gyropode Segway® en équilibre et en toute sécurité.
Les ordinateurs utilisent un logiciel très sophistiqué. Il traite toutes les informations des gyroscopes et ajuste la vitesse des moteurs en conséquence. Les moteurs (alimentés par 2 batteries Lithium-ion) actionnent chaque roue indépendamment à des vitesses variables.
Quand le gyropode Segway® s’incline en avant, les deux roues tournent vers l’avant pour l’empêcher de tomber. Et inversement si le gyropode Segway® s’incline en arrière.
Quand l’utilisateur penche le LeanSteer dans une direction, les moteurs font tourner une roue plus vite que l’autre ou dans des directions opposées pour faire pivoter le gyropode Segway®.